
Xinyuan Luo
About Me
My name is Xinyuan Luo. I am a first-year PhD student in Robotics at Duke University, co-advised by Prof. Xianyi Cheng at the Robot Dexterity Lab and Prof. Boyuan Chen at the General Robotics Lab.
Before starting my PhD, I worked as a Robot Learning Engineer at Kepler Robotics, focusing on dual-arm manipulation for humanoid robots in industrial applications.
I earned my Master’s degree in Autonomy and Robotics from University of Illinois at Urbana-Champaign, advised by Prof. Wenzhen Yuan.
I received my Bachelor of Engineering from the School of Sensing Science and Technology at Shanghai Jiao Tong University, advised by Prof. Hongbing Li, mentored by Prof. Zhenyu Huang.
I am a passionate roboticist dedicated to the realization of general humanoid robots, aiming to contribute significantly to this field. My dream is to start my own company in robotics and help humanity achieve this technological milestone.
I enjoy making friends with people from diverse backgrounds. Feel free to contact me via Email or WeChat: lxynzmzmc.
Research Interests
- Robotics: perception, manipulation, system pipeline design
- Machine Learning: reinforcement learning, large language model
News
- [Aug. 2025] Joining Duke University as a PhD student!
- [Jan. 2025] Joining Kepler Robotics!
- [Dec. 2024] Graduating from UIUC!
- [July. 2024] One paper about pancake-making robot accepted by IROS 2024!
- [August. 2023] Joining UIUC as a master’s student in Autonomy & Robotics MEng.
- [June. 2023] Graduating from SJTU with a bachelor’s degree!
Publications
-
 IROS
IEEE/RSJ International Conference on Intelligent Robots and Systems, 2024.
IROS
IEEE/RSJ International Conference on Intelligent Robots and Systems, 2024. -
 ICRA
2026 IEEE International Conference on Robotics & Automation
ICRA
2026 IEEE International Conference on Robotics & Automation
Projects
-
 Course Project
Course Project at University of Illinois at Urbana-Champaign
Course Project
Course Project at University of Illinois at Urbana-Champaign -
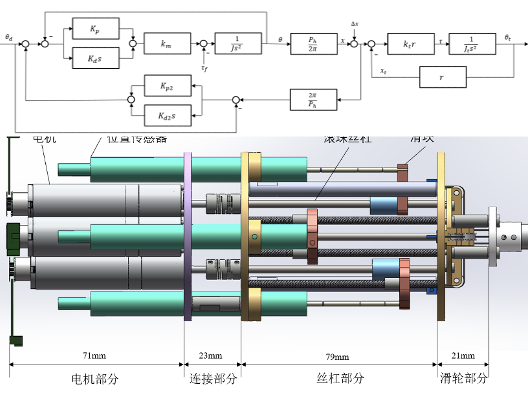 Undergrad thesis
Undergraduate Thesis at Shanghai Jiao Tong UniversityPDF Undergrad Thesis
Undergrad thesis
Undergraduate Thesis at Shanghai Jiao Tong UniversityPDF Undergrad Thesis -
 Personal project
Permanent memory/Understanding image/large ACG words database/likability system/State transfer modelProject Page Sold 200+ copies on Taobao
Personal project
Permanent memory/Understanding image/large ACG words database/likability system/State transfer modelProject Page Sold 200+ copies on Taobao -
 Startup Project
The 9th China International College Students' Internet+ Innovation and Entrepreneurship CompetitionPDF Silver Award
Startup Project
The 9th China International College Students' Internet+ Innovation and Entrepreneurship CompetitionPDF Silver Award -
 Undergrad project
Unfinished due to COVIDPDF Personal First scientific project
Undergrad project
Unfinished due to COVIDPDF Personal First scientific project -
 PRP project
Embedded Chip and System Design Competition 2021PDF Second Prize of the East China Area
PRP project
Embedded Chip and System Design Competition 2021PDF Second Prize of the East China Area -
 Course project
Shanghai Jiao Tong University Engineering Innovation Project Exhibition 2019PDF Outstanding Project
Course project
Shanghai Jiao Tong University Engineering Innovation Project Exhibition 2019PDF Outstanding Project
Powered by Jekyll and Minimal Light theme.